The 4.5 billion years of geologic evolution has shaped the tectonic processes in Earth we see today. Over the span of time, Earth has changed from being a magma ocean to a tectonically active planet, by transitioning through different tectonic regimes. A silent witness of this journey have been cratons which have survived for billions of years. Therefore cratons preserve clues of past tectonic pr ...[Read More]
Cratons: building blocks of continents and their economic importance
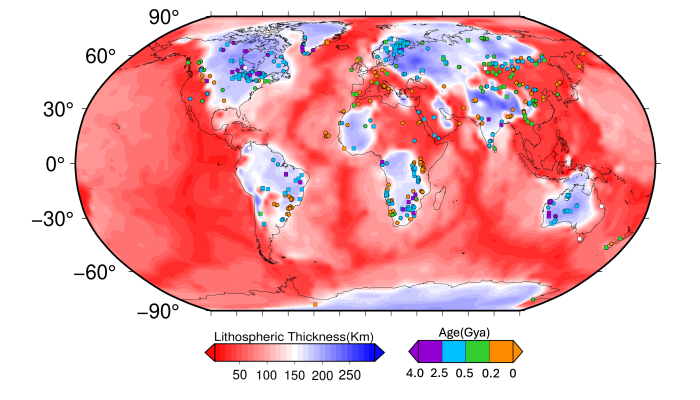
A map showing how mineral deposits are often concentrated along the edges of the thick lithosphere. The coloured boxes represent distribution of large igneous intrusions, which contains Ni-Cu-PGE deposits and the circles represent distribution of carbonatites which might contain REEs (Lithosphere thickness data from Priestley et al, 2024, Carbonatite locations from Liu et al., 2022, large igneous intrusion locations from Smith and Maier, 2021)